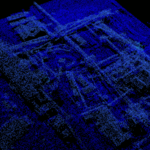
Nuage de points LIDAR 2013-2014
Cette couche de données correspond au nuage de points cotés (Coord XYZ) produit à partir des données LIDAR.- Propriétaire : Service public de Wallonie (SPW)
- Date de création de la géodonnée : 16 mai 2014
Url de la fiche descriptive :
Résumé
Mots-clés
- Thème(s) Géoportail :
- Photos et imagerie
- Thème(s) INSPIRE :
- Non renseigné
- Autre(s) :
- LIDAR ; point coté ; Z ; MNT ; MNS ; LAS ; LAZ ; modélisation ; tridimensionnel ; aéroporté ; vol ; semi de points ; nuage de points ; 3D ; ASPRS ; généralités ; géographie ; espace ; appareil volant ; végétation ; densité ; point ; nuage ; modèle terrestre numérique ; laser ; pont ; sol ; altitude
Aperçu

Consulter
Consulter la donnée dans une application
Visualisez la donnée dans une carte conçue spécialement pour elle.
Consulter la donnée via un webservice
Obtenir une copie de la donnée
Si le bouton n'est pas grisé, cliquez sur "AJOUTER À MES TÉLÉCHARGEMENTS" pour ajouter la donnée à votre panier. Ensuite, finalisez votre demande de téléchargement.
Format de distribution
- LASZip (.laz)
Conditions pour télécharger et utiliser la donnée
Licence : A PRENDRE DANS LE CHAMP EN LIGNE -> METAWAL
Citation des crédits
Comment citer cette donnée ?
Service public de Wallonie (SPW) - Nuage de points LIDAR 2013-2014 (2015-01-15)
http://geodata.wallonie.be/id/cd7578ef-c726-46cb-a29e-a90b3d4cd368
L'étendue temporelle indique la période à laquelle la donnée a été observée sur le terrain.
Modèle de la donnée
Retrouvez ci-dessous la description des attributs de la donnée, sa structure, etc.
Non renseigné
Légende
Retrouvez ci-dessous les documents qui décrivent la légende de la donnée.
Identification de la fiche descriptive
- Identifiant de la fiche descriptive
- cd7578ef-c726-46cb-a29e-a90b3d4cd368
- Fiche descriptive complète
- Consultez la fiche descriptive complète dans Metawal.
Identification de la donnée
- Identifiant global de la donnée
- http://geodata.wallonie.be/id/cd7578ef-c726-46cb-a29e-a90b3d4cd368
- Identifiant local de la donnée
- Non renseigné
- Date de la dernière diffusion
- Dernière mise à jour de la donnée
Langue de la donnée
Vous avez une question sur...
Vous souhaitez...
Pour toute autre question...
(SPW - DG03 - DNF) Contacter